
Motor Driver and Power Distribution Board for Romi Chassis







POLOLU
Motor Driver and Power Distribution Board for Romi Chassis
Description
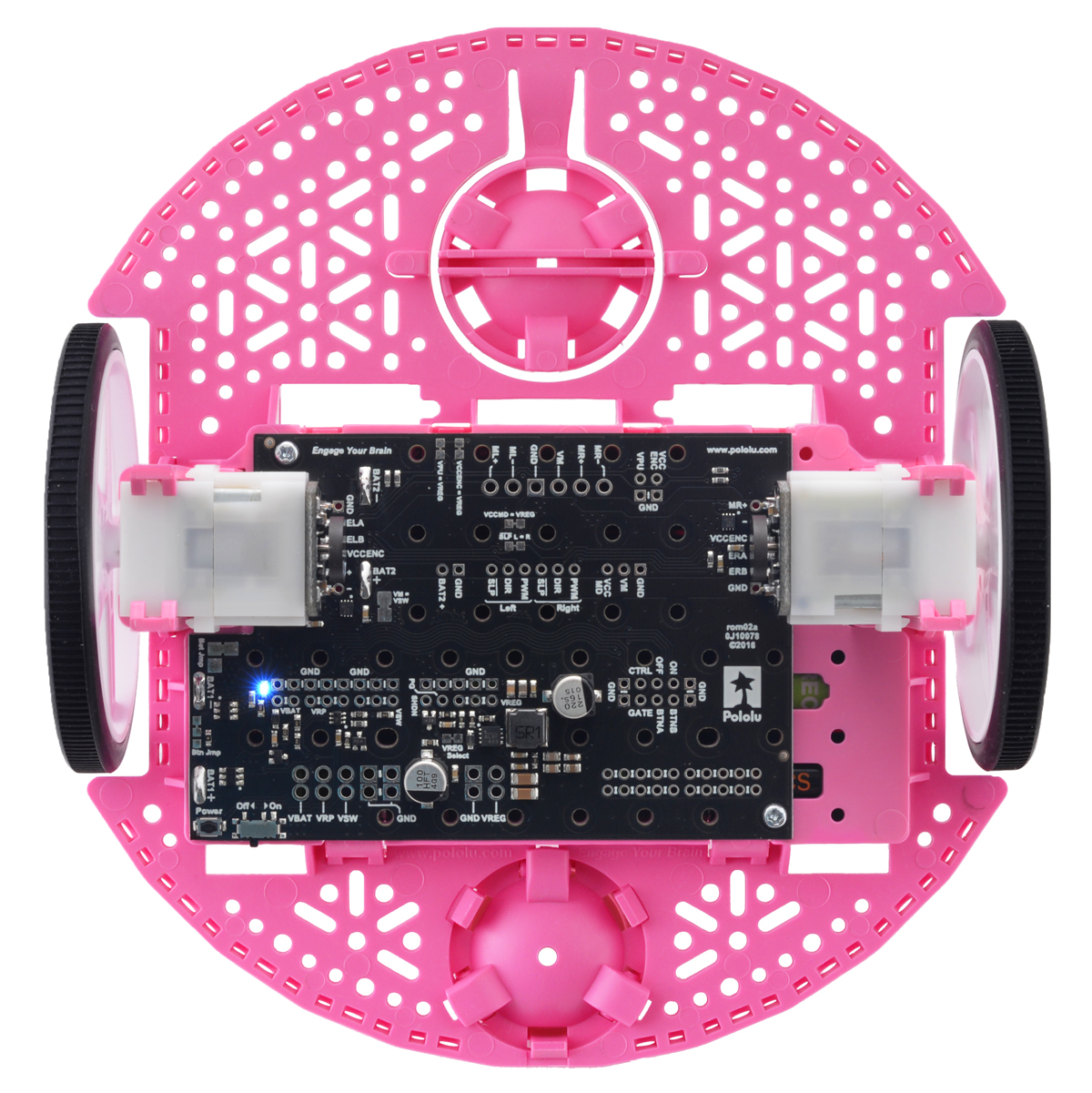
Use this motor driver and power distribution board to get your Romi chassis running quickly. It offers all of the same features as the smaller Power Distribution board for Romi Chassis — battery contact slots, reverse voltage protection, several power switching options, and easy access to the various power busses — and adds a two-channel motor driver and powerful switching step-down regulator that can supply a continuous 2.5 A at 5 V or 3.3 V. Just add a microcontroller and sensors to complete your Romi robot.
This motor driver and power distribution board is designed specifically for the Romi chassis as a convenient way to drive the chassis’s motors and power the rest of the electronics that make up your robot. It features two DRV8838 motor drivers, one for each of the chassis’s motors, and a powerful switching step-down regulator that can supply a continuous 2.5 A at 5 V or 3.3 V. The board has slots for soldering in the Romi chassis battery contact tabs, and it incorporates the power switching and distribution functionality from the Power Distribution Board for Romi Chassis, so it offers all of the same features: reverse voltage protection, several power switching options, and easy access to the various power busses.
Like the smaller Power Distribution Board, this board has a small pushbutton already installed and offers convenient points for connecting external pushbutton or tactile switches in parallel. It also offers several alternate pushbutton connection options that result in push-on-only or push-off-only operation, and additional inputs enable further power control options like allowing your robot to turn off its own power. Alternatively, the board can be reconfigured to disable the pushbutton circuit and give control to the small installed slide switch.
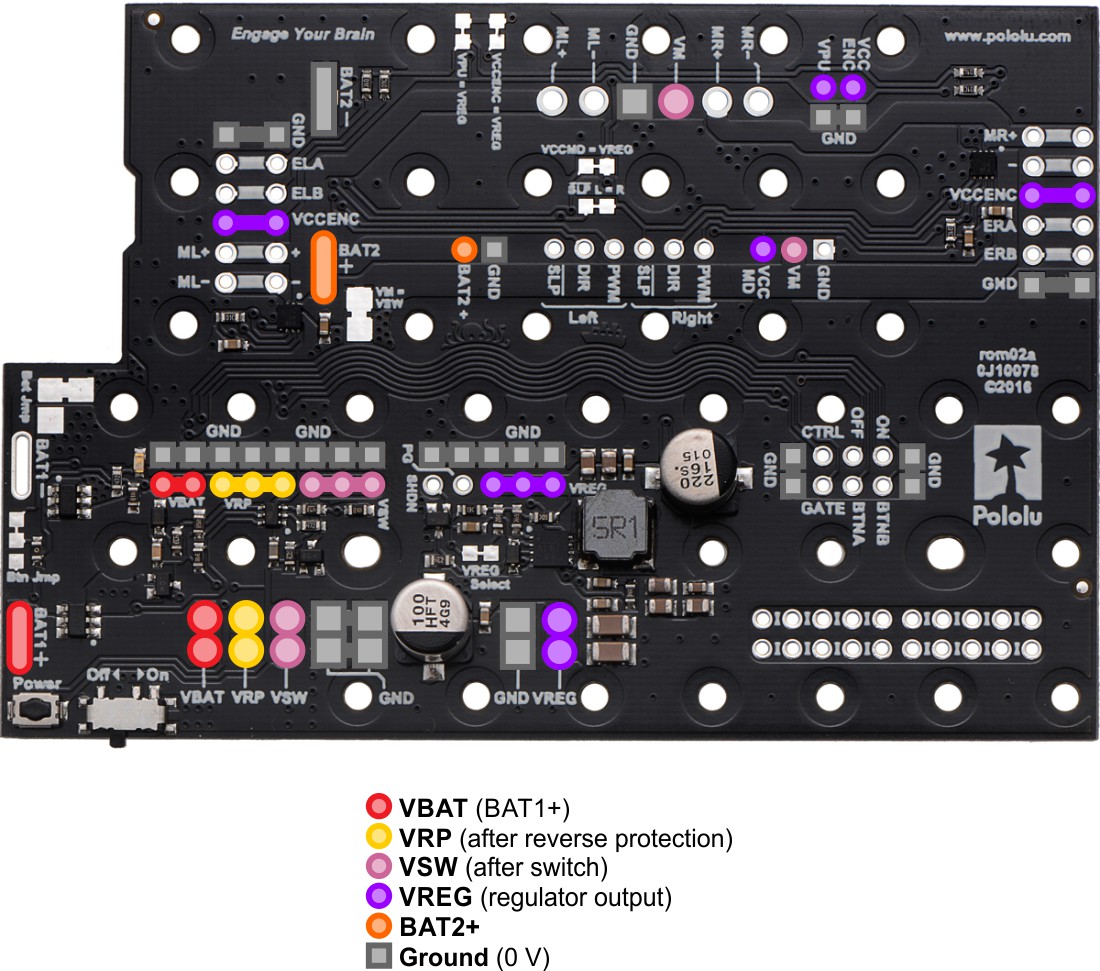
The board’s power buses are accessible through a set of 0.1″-spaced pins that are compatible with standard 0.1″ male and 0.1″ female headers, and also through a larger set of holes that are compatible with 3.5mm-pitch terminal blocks (you can combine a 2-pin block and a 3-pin block into a single 5-pin block that spans the three power holes and two ground holes).
 |
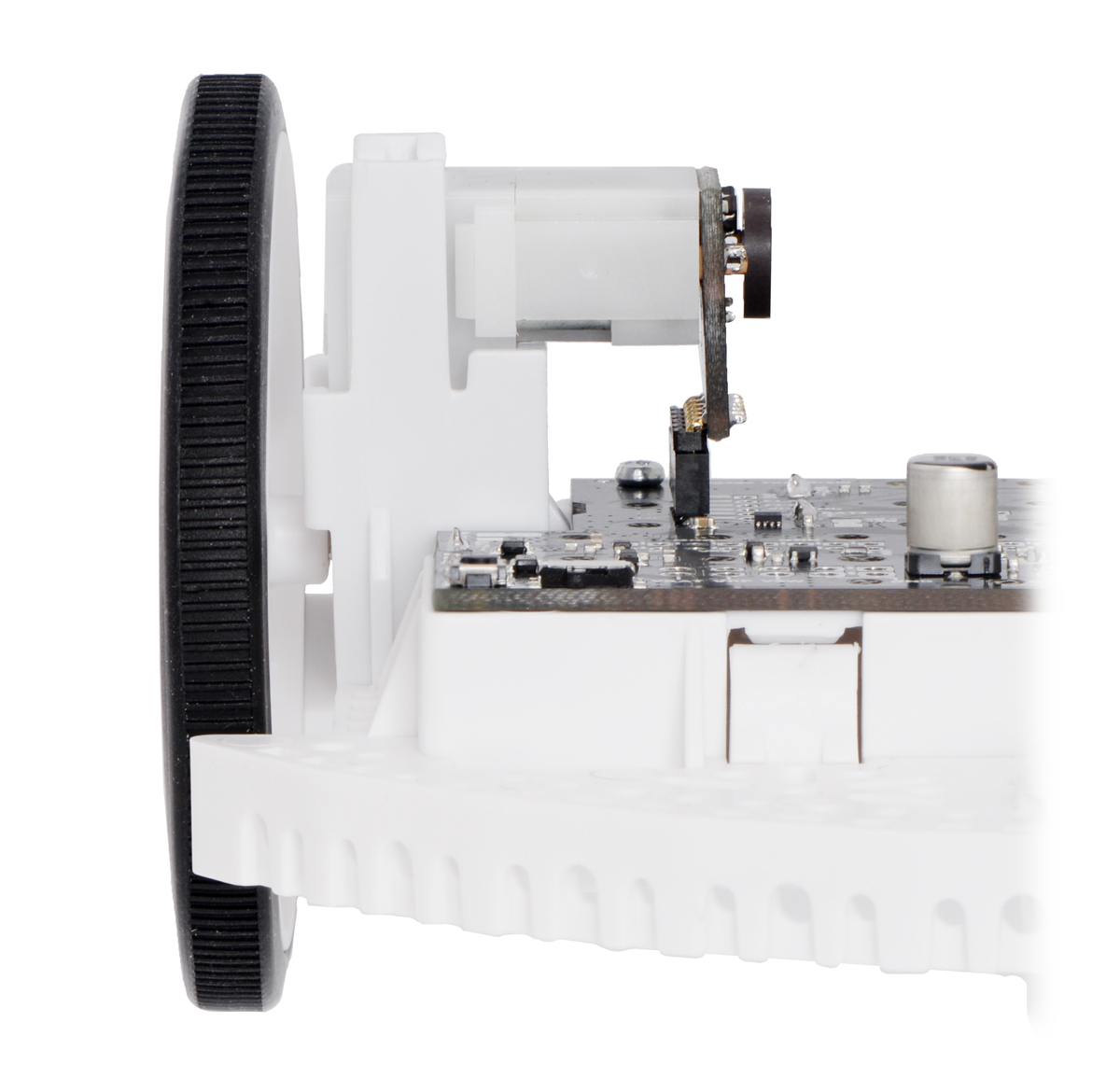
Two 1/4″ #2-56 screws and two #2-56 nuts are included for mounting the board to the Romi chassis, and two low-profile female headers are included for connecting the motors to the board. If you have Romi encoders installed on your motors with the header pins down, they will plug directly into the board via these female headers.
|
|
General specifications
| Current rating: | 5 A2 |
|---|---|
| Motor driver: | DRV8838 |
| Motor channels: | 2 |
| Minimum operating voltage: | 2.5 V |
| Maximum operating voltage: | 10.8 V |
| Continuous output current per channel: | 1.8 A3 |
| Maximum PWM frequency: | 250 kHz |
| Reverse voltage protection?: | Y |
Notes
1. Board only; no screws or nuts.
2. Of VSW.
3. This is also the peak output current of the motor driver; over-current protection can trigger as low as 1.9 A.