
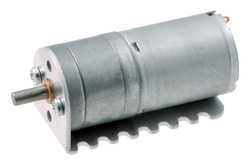
34:1 Metal Gearmotor 25Dx52L mm HP with 48 CPR Encoder


POLOLU
34:1 Metal Gearmotor 25Dx52L mm HP with 48 CPR Encoder
Description
Gearmotor Options
This brushed DC gearmotor is available in high- and low-power versions in a number of gear ratios. The motor and encoder portions are available by themselves (i.e. without the gearbox), and many other gear ratios are also available without an encoder.
|
Gear Ratio |
No-Load Speed @ 6 V |
Stall Torque @ 6 V |
Stall Current @ 6 V |
With Encoder |
Without Encoder |
|
1:1 |
9800 RPM |
2 oz-in |
6 A |
motor without gearbox |
|
|
|
5600 RPM |
1 oz-in |
2.2 A |
motor without gearbox |
|
|
4.4:1 |
2220 RPM |
8 oz-in |
6 A |
25Dx48L mm HP |
25Dx48L mm HP |
|
|
1280 RPM |
5 oz-in |
2.2 A |
|
25Dx48L mm |
|
9.7:1 |
1010 RPM |
17 oz-in |
6 A |
25Dx48L mm HP |
25Dx48L mm HP |
|
|
580 RPM |
11 oz-in |
2.2 A |
25Dx48L mm |
25Dx48L mm |
|
20.4:1 |
480 RPM |
36 oz-in |
6 A |
|
25Dx50L mm HP |
|
|
275 RPM |
24 oz-in |
2.2 A |
|
25Dx50L mm |
|
34:1 |
285 RPM |
60 oz-in |
6 A |
25Dx52L mm HP |
25Dx52L mm HP |
|
|
165 RPM |
40 oz-in |
2.2 A |
25Dx52L mm |
25Dx52L mm |
|
47:1 |
210 RPM |
80 oz-in |
6 A |
25Dx52L mm HP |
25Dx52L mm HP |
|
|
120 RPM |
50 oz-in |
2.2 A |
25Dx52L mm |
25Dx52L mm |
|
75:1 |
130 RPM |
130 oz-in |
6 A |
25Dx54L mm HP |
25Dx54L mm HP |
|
|
75 RPM |
85 oz-in |
2.2 A |
25Dx54L mm |
25Dx54L mm |
|
99:1 |
100 RPM |
160 oz-in |
6 A |
25Dx54L mm HP |
25Dx54L mm HP |
|
|
57 RPM |
110 oz-in |
2.2 A |
|
25Dx54L mm |
|
172:1 |
57 RPM |
260 oz-in |
6 A |
|
25Dx56L mm HP |
|
|
33 RPM |
170 oz-in |
2.2 A |
25Dx56L mm |
25Dx56L mm |
|
227:1 |
25 RPM |
220 oz-in |
2.2 A |
|
25Dx56L mm |
|
378:1 |
15 RPM |
250 oz-in |
2.2 A |
|
25Dx58L mm |
|
499:1 |
12 RPM |
300 oz-in |
2.2 A |
|
25Dx58L mm |


These motors are intended for use at 6 V. In general, these kinds of motors can run at voltages above and below this nominal voltage, so they should comfortably operate in the 3 – 9 V range, though they can begin rotating at voltages as low as 1 V. Higher voltages could start negatively affecting the life of the motor.Note: At some of the higher gear ratios, these motors can generate enough torque to damage themselves. Any torque greater than about 250 oz-in (18 kg-cm) is likely to damage the gearbox, so we recommend that you avoid stalling the 172:1 HP, 227:1,378:1, and 499:1 versions of these motors at 6 V.
Gearmotor Dimensions
These gearmotors have output shafts with a diameter of 4 mm. The Pololu universal aluminum mounting hub for 4mm shafts can be used to mount our larger Pololu wheels (60mm-, 70mm-, 80mm-, and 90mm-diameter) or custom wheels and mechanisms to the gearmotor’s output shaft (see the left picture below). These are the same type of motors used in the Wild Thumper all-terrain chassis, and the gearbox’s output shaft works directly with the 120mm-diameter Wild Thumper wheels.
  |
| 25D mm metal gear motor with 48 CPR encoder and Pololu 60×8mm wheel. |
|---|
The face plate has two mounting holes threaded for M3 screws. You can use our custom-designed25D mm metal gearmotor bracket (shown in the picture below) to mount the gearmotor to your project via these mounting holes and the screws that come with the bracket.
 |
| Pololu 25D mm gearmotor with bracket. |
|---|
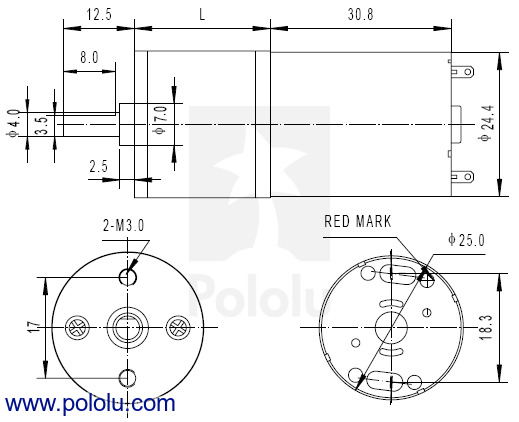
The diagram below shows the dimensions (in mm) of the 25D mm line of gearmotors. The value of Lis shown in the table below.
|
|
|
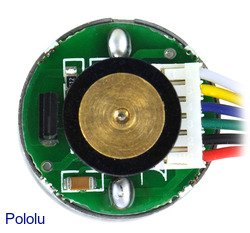 |
| 25D mm metal gearmotor with 48 CPR encoder: close-up view of encoder. |
|---|
Using the Encoder
A two-channel Hall effect encoder is used to sense the rotation of a magnetic disk on a rear protrusion of the motor shaft. The quadrature encoder provides a resolution of 48 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output, multiply the gear ratio by 48. The motor/encoder has six color-coded, 11" (28 cm) leads terminated by a 1×6 female header with a 0.1″ pitch, as shown in the main product picture. This header works with standard 0.1″ male headers and our male jumper andprecrimped wires. If this header is not convenient for your application, you can pull the crimped wires out of the header or cut the header off. The following table describes the wire functions:
|
Color |
Function |
|
Red |
motor power (connects to one motor terminal) |
|
Black |
motor power (connects to the other motor terminal) |
|
Green |
encoder GND |
|
Blue |
encoder Vcc (3.5 – 20 V) |
|
Yellow |
encoder A output |
|
White |
encoder B output |
The Hall sensor requires an input voltage, Vcc, between 3.5 and 20 V and draws a maximum of 10 mA. The A and B outputs are square waves from 0 V to Vcc approximately 90° out of phase. The frequency of the transitions tells you the speed of the motor, and the order of the transitions tells you the direction. The following oscilloscope capture shows the A and B (yellow and white) encoder outputs using a motor voltage of 6 V and a Hall sensor Vcc of 5 V:
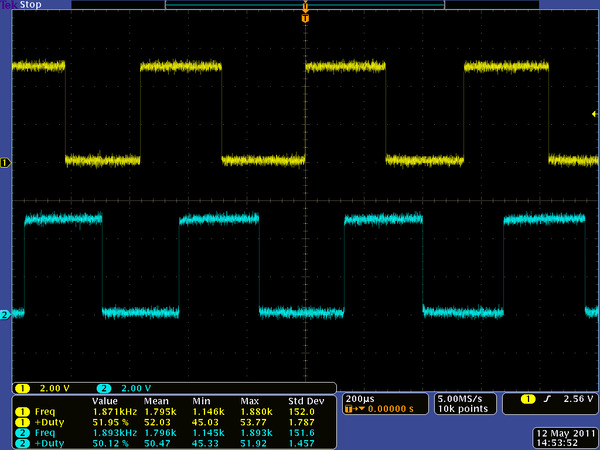 |
| Encoder A and B outputs for 25D mm HP metal gearmotor with 48 CPR encoder (motor running at 6 V). |
|---|
By counting both the rising and falling edges of both the A and B outputs, it is possible to get 48 counts per revolution of the motor shaft. Using just a single edge of one channel results in 12 counts per revolution of the motor shaft, so the frequency of the A output in the above oscilloscope capture is 12 times the motor rotation frequency.
Selecting the Right Gearmotor
We offer a wide selection of metal gearmotors that offer different combinations of speed and torque. Our metal gearmotor comparison table can help you find the motor that best meets your project’s requirements.
 |
| Some of the Pololu metal gearmotors. |
|---|